














Technical Highlights
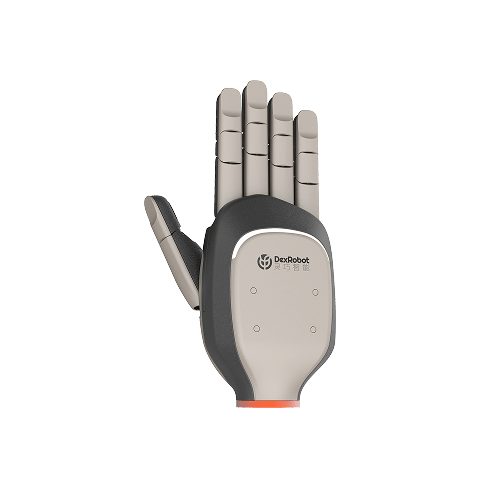
Dexterity-Strength Synergy
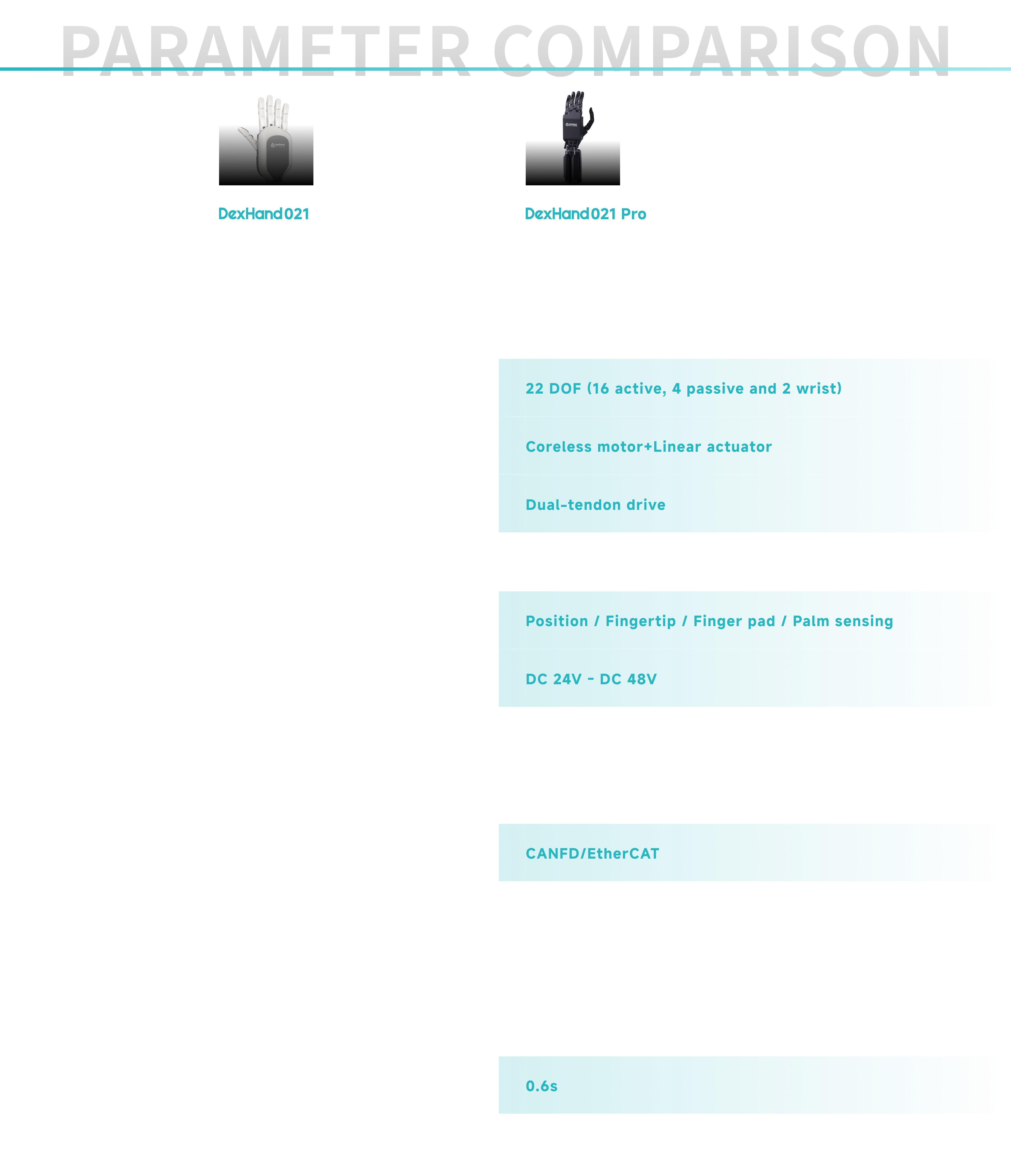
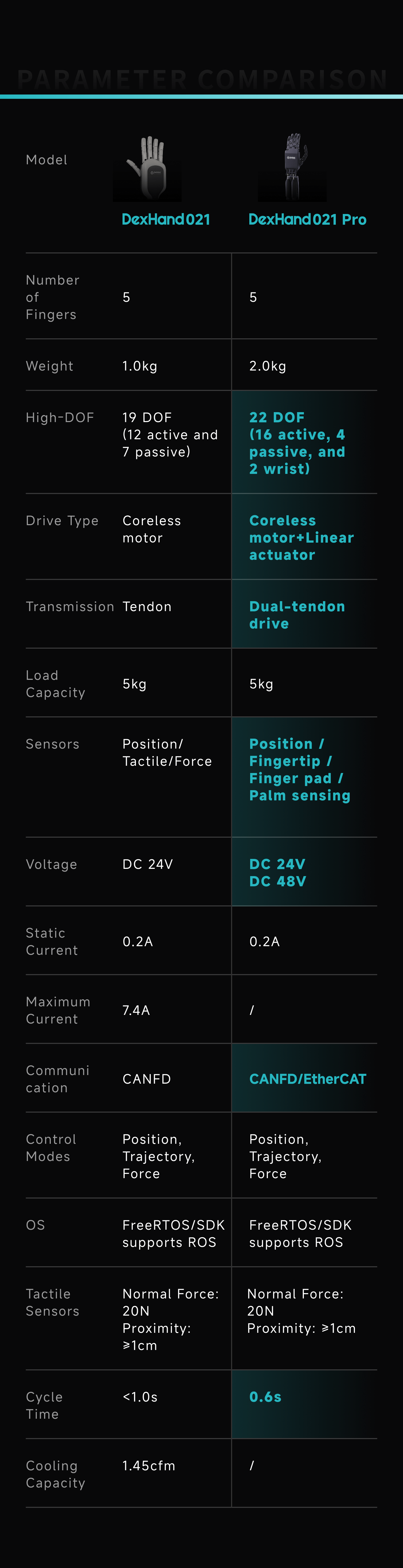
22-DOF Bionic Structure
22-DOF Bionic Structure
Dual-tendon Omnidirectional Drive
Omnidirectional Opposable 3D Spatial Coverage Wrist-hand Integrated
Omnidirectional Opposable 3D Spatial Coverage Wrist-hand Integrated

Wrist-hand Integrated Structure
Extended Wrist DOF and Coordination Technology
Extended Wrist DOF and Coordination Technology
Global Perception Design
Multi-modal Sensing across Full Operational Domain with Data-driven Precision Control
Multi-modal Sensing across Full Operational Domain with Data-driven Precision Control


Near-human dexterity – Omnidirectional wide-range opposition
Dual-tendon omnidirectional drive – Integrated wrist-hand structure
Embedded local computing power– Pioneering a new paradigm for intelligent dexterous manipulation

















COPYRIGHT © DEXROBOT CO., LTD. ALL RIGHTS RESERVED.
浙ICP备2024093404号