


















Development-Ready Out of the Box

Intelligent Thermal Management for 24/7 Operation
Intelligent Thermal Management for 24/7 Operation
2.38 cfm cooling capacity with active cooling design ensures 7 x 24 h continuous and stable operation.
Over 1 million lifespan cycles reduce maintenance frequency and ensure better durability.
Real-time temperature monitoring and abnormal auto-protection ensure a more secure and reliable operation.
Intelligent Thermal Management for 24/7 Operation
2.38 cfm cooling capacity with active cooling design ensures 7 x 24 h continuous and stable operation.
Over 1 million lifespan cycles reduce maintenance frequency and ensure better durability.
Real-time temperature monitoring and abnormal auto-protection ensure a more secure and reliable operation.

Multi-modal Perception
Adaptive Rigid-Soft Coupling
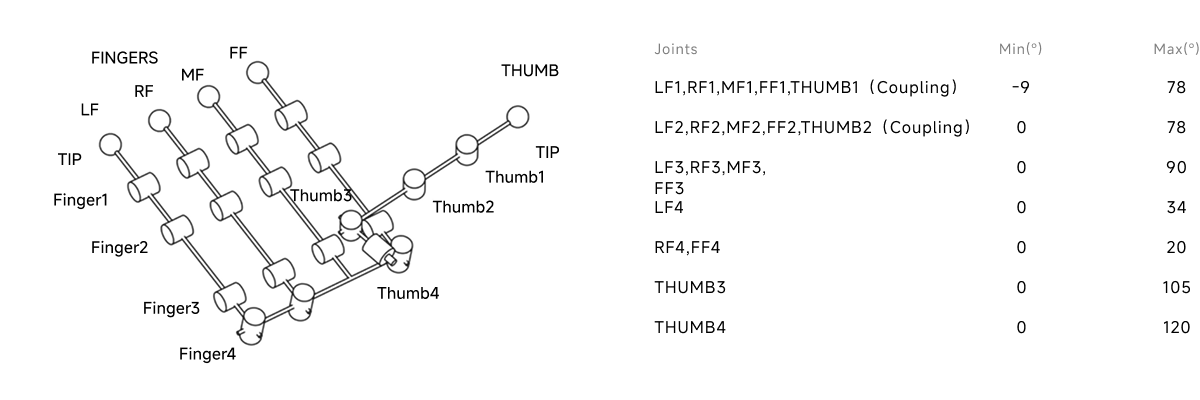
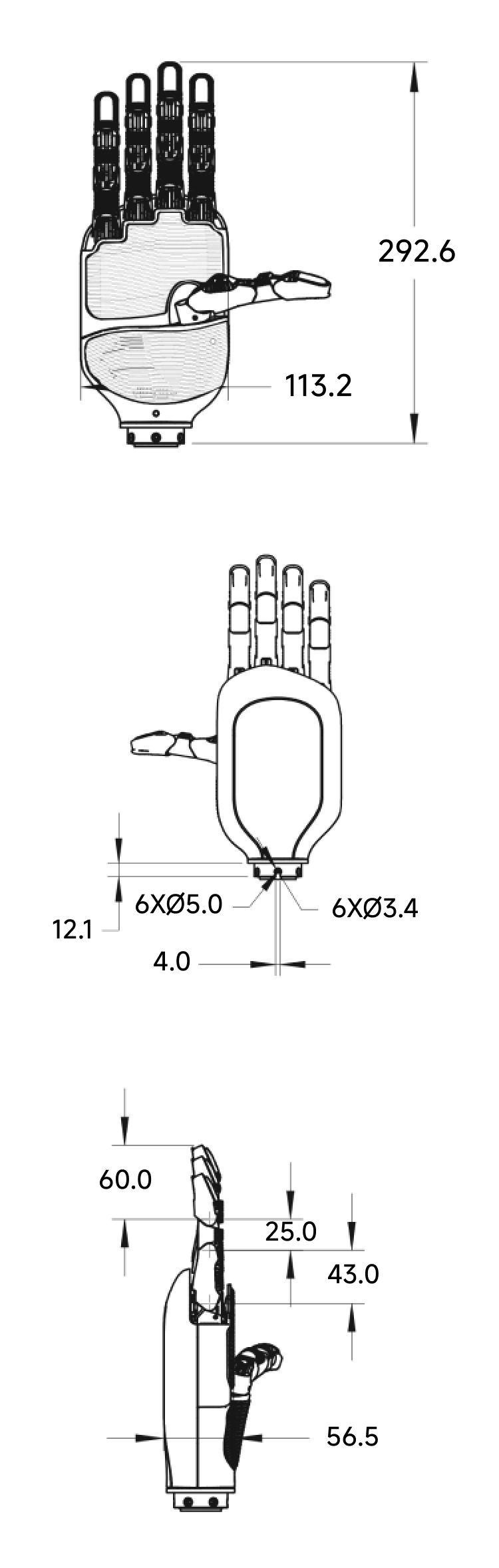
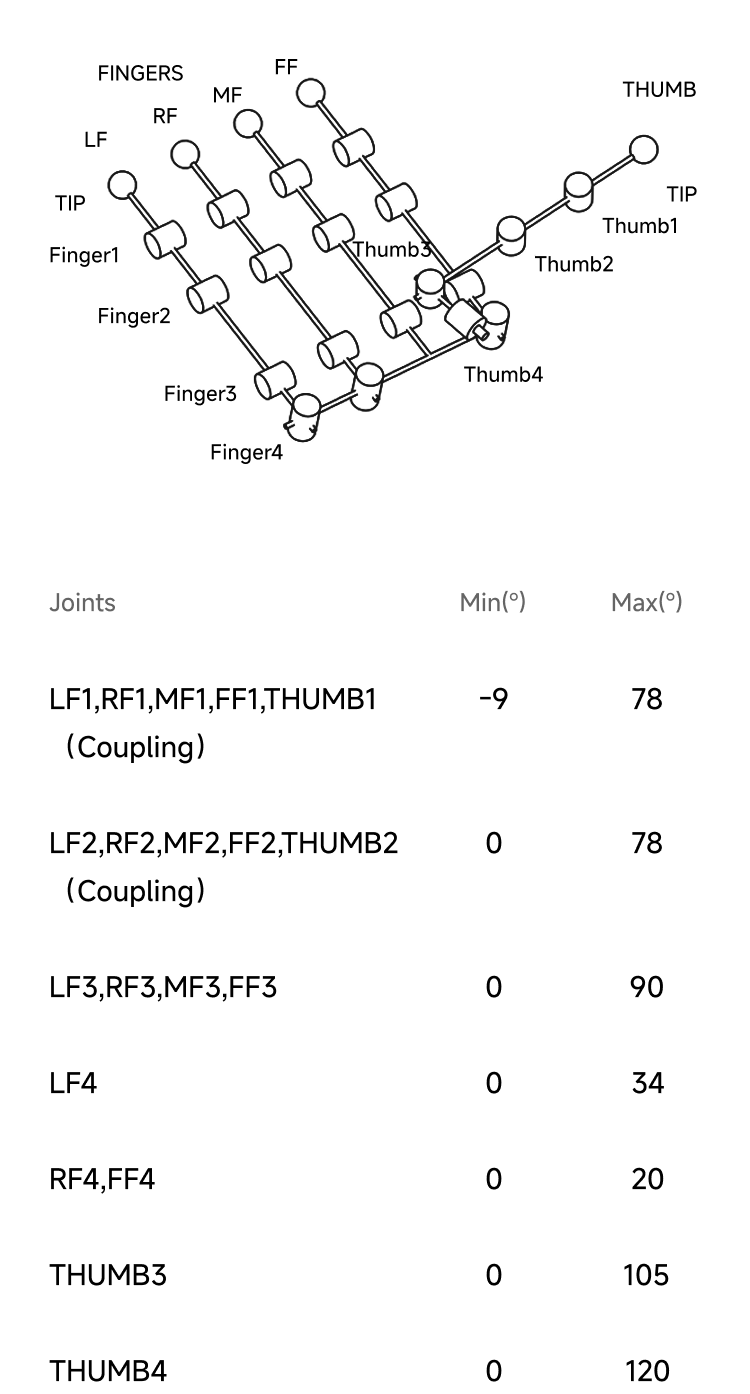
19 DoF rope-driven bionic design enabling anthropomorphic dexterous manipulation
23 integrated sensors for multi-modal perception,
including position, temperature, multi-dimensional force, and proximity.
0.1 N high sensitivity for precise perception of external environments.
Adaptive grasping with integrated adaptive grasping and control algorithms
19 DoF rope-driven bionic design enabling anthropomorphic dexterous manipulation
23 integrated sensors for multi-modal perception,
including position, temperature, multi-dimensional force, and proximity.
0.1 N high sensitivity for precise perception of external environments.
Adaptive grasping with integrated adaptive grasping and control algorithms

Robust Ecosystem with
End-to-end
Development Support
Development-ready, empowering developments from tutorials to deployment.
Provides DexTac simulation framework and DexCanvas datasets.
Standardized platform and open-source ecosystem.
Supports rapid algorithm migration and verification.
Development-ready, empowering developments from tutorials to deployment.
Provides DexTac simulation framework and DexCanvas datasets.
Standardized platform and open-source ecosystem.
Supports rapid algorithm migration and verification.
Features


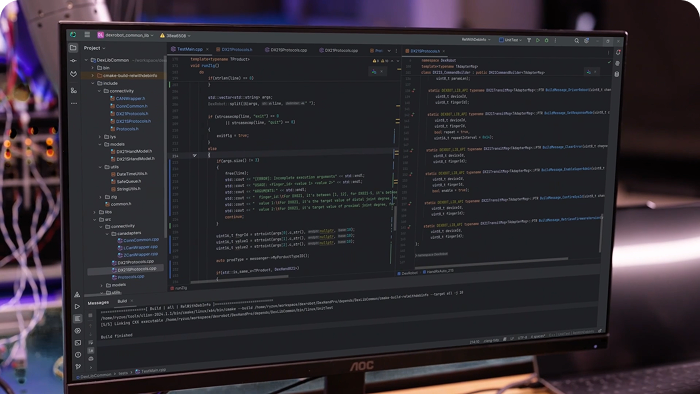
Frontier Algorithm Physical Verification Interface
A standardized hardware platform providing a real-world carrier for
frontier embodied intelligence research. It helps researchers seamlessly
migrate simulation algorithms to physical environments, producing high-level, reproducible research papers.
Execution Terminal for Precise Operations in Hazardous Scenarios
7x24h continuous operation capability and multi-modal perception adapt
to unstructured, high-risk environments. It alternates human labor to
achieve safe and reliable operation of irregular, precision, or fragile components.

Teaching & Prototyping Platform for Dexterous Operations
Provides end-to-end development support from tutorials to simulation,
significantly lowering the barrier to learning and innovation. It supports
quick algorithm validation and prototype development, shortening R&D cycles.
Natural Interaction Execution Module for Service Robots
Bionic design and precise force control provide safe and natural physical
interaction capabilities for human-robot collaboration. It can be
integrated as a standard hand module to empower service robots in completing complex daily interaction tasks.
Application Scenarios

Embodied Intelligence Algorithm Validation in Advanced Labs
Provides a standardized hardware platform to support the repeatability of
dexterous operation research. Equipped with open-source simulation
models and datasets to assist in high-level scientific research output and journal publications.

Industrial Automation & High-Risk Environment Operations
With intelligent thermal management and active cooling, it meets the
demands for all-weather continuous operation under extreme conditions.
It integrates multi-modal perception and micro-force control for precise operation in unstructured environments.
High-End Education & Quick Prototyping
Offers end-to-end development support from basic tutorials to an open-source SDK,
lowering the threshold for developing dexterous manipulation algorithms.
Simulation environments and real-world datasets support robotics teaching and innovation projects.

Natural Interaction Upgrades for Service Robots
An open-source ecosystem and rich tutorials facilitate the rapid
development of diverse applications. Bionic operation and secure interaction,
supported by compliant transmission, ensure the safety of human-robot collaboration.

Resolution 0.1 N
Accuracy ± 2% F.S.
Directional Resolution 45°

















COPYRIGHT © DEXROBOT CO., LTD. ALL RIGHTS RESERVED.
浙ICP备2024093404号